







注目の消防車両 CLOSE-UP! 消防ロボットシステム

今後発生が懸念されている南海トラフ巨大地震・首都直下地震の被害が想定される区域にはエネルギー・産業基盤が集積しており、そのリスクが想定されているところだ。総務省消防庁ではこのような状況を踏まえ、消防隊員が現場に近づけない大規模・特殊な災害において、ロボット自身が判断して行動する自律技術、ロボット相互に情報交換し活動する協調連携技術、大規模な火災に対応可能な耐放射熱技術を活用し、これらの災害に対応できる消防ロボットシステムの研究開発を2014年度よりスタート。5年計画で進められていたプロジェクトにより実戦配備型の消防ロボットシステムが完成し、2019年3月22日に公開された。
消防ロボットシステムは「飛行型偵察・監視ロボット」「走行型偵察・監視ロボット」「放水砲ロボット」「ホース延長ロボット」「指令システム」で構成され、これらを1台の車輌に積載し出動することが可能。また、各ロボットは自律技術や協調連携技術を活用しているのが特徴で、従来の消防ロボットが「隊員による遠隔操作ができる放水砲」というニュアンスだったのに対し、消防ロボットシステムでは役割の異なる複数のロボットが互いに連携して情報収集から放水活動までを自動・自律的に行えるように進化を遂げている。
具体的な活動の流れとしては、まず飛行型偵察・監視ロボットが上空からの偵察を実施。続けて走行型偵察・監視ロボットを投入して現場の状況を確認する。これにより得られた情報により「放水砲ロボット」と「ホース延長ロボット」の進入経路や部署位置などを「指令システム」が自動で計算して消防隊員に提案。また、放水に際しても風向きやタンクの特性といった要素などをふまえて放水砲の向きを提案してくれる。これら提案を隊員がチェックし、問題なければ実行を「下命」することでほぼ自動で活動を遂行することができる。
消防隊員が接近できない現場の最前線で火災の拡大抑制を担うロボットたち。その使命を果たすために課題となったのが耐熱性能だ。いずれのロボットも耐火服でおなじみの銀面生地で覆われており、これにより輻射熱を反射させることができる。中でも火元に最も接近する「放水砲ロボット」と「ホース延長ロボット」は自衛噴霧装置も備えており、これらにより20.0kW/㎡の放射熱に耐えることが可能だ。この数値は、国内最大級の原油タンクにおいて最大火災(全面火災)が発生した場合に、有効放水射程内となる50mの位置で計測される放射熱の値から算出している。
2011年の東日本大震災では千葉県市原市のLPGタンクで大規模火災が発生。2012年に発生した兵庫県姫路市の日本触媒姫路製造所の爆発火災では消防職員1名が殉職し、負傷者36名(うち消防職員24名)という大きな人的被害をもたらした。こうした特殊な災害の現場においても、消防ロボットシステムを活用すれば直接的な消火や被害拡大防止のための冷却放水を効果的に実施できるようになる。今回完成した消防ロボットシステムは全国有数のエネルギー・産業基盤が集積する千葉県の市原市に実証配備されることが決定。市原市消防局では八幡消防署に配置し、消防ロボットシステムによる特殊装備小隊「スクラムフォース」として運用していく。
火元と活動可能位置との距離及び放射熱
| 活動 | 距離 | 放射熱(*) |
| 開発する放水砲ロボット | 50m程度 | 20.0kW/㎡ |
| 遠隔操作消防ロボット | 200m以上 | (6.0kW/㎡) |
| 消防隊(耐熱服) | 300m以上 | 4.0kW/㎡ |
| 消防隊(防火衣) | 400m以上 | 2.5kW/㎡ |
| 作業員 | 500m以上 | 1.5kW/㎡ |
| (*)放射熱:火炎から電磁波として放射されるエネルギー。高熱火炎では放射熱が熱源の大部分となる。 | ||

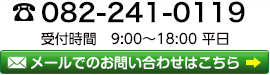
飛行型 偵察・監視ロボット[スカイ・アイ]
現場において最初に投入されるのが、この飛行型偵察・監視ロボットだ。現場上空を自律飛行し、災害の状況や放水砲ロボット等が走行する経路の状況を偵察。また、放水砲ロボットによる放水開始後には放水軌跡を上空から撮影し、目的の場所に放水が到達しているかを監視する。
機体は同軸二重反転型のドローンで、産業用UAVのメーカーのAileLinXが開発を担当。自動離着陸はもちろん、自律機能により地図上の指定位置まで飛行が可能だ。飛行方式に上下のプロペラが逆向きに回転する二重反転機構を採用することで安定した飛行を実現し、同時に、機体へ風を当てることで高い耐輻射熱性能を実現している。
上空からは可視画像や熱画像に加え、輻射熱量、可燃ガス濃度、風向・風速などの各種データを伝送でき、シンバル機構を搭載した2台のカメラにより常に目標物を捕捉し撮影を行うことができる。
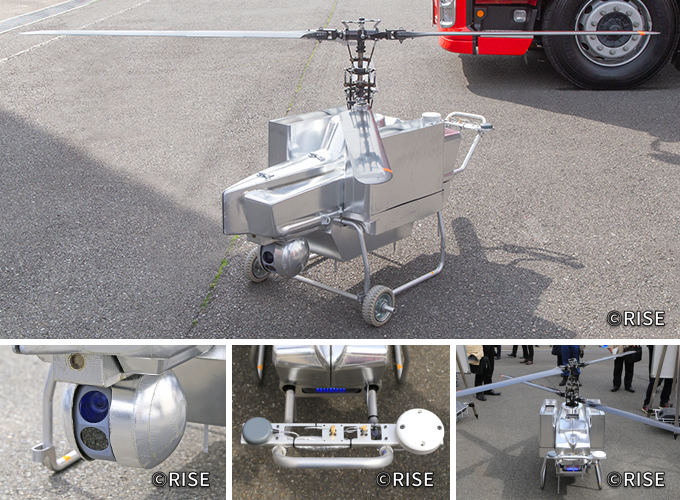
走行型 偵察・監視ロボット[ランド・アイ]

飛行型偵察・監視ロボットからの情報を参考として、放水砲ロボット等が走行する経路を先に走行し、経路や災害の状況をより詳しく偵察するロボットで三菱電機特機システムが開発を担当。
先行して現場に入ることから走行経路上に障害物が存在することが考えられるため、自律走行精度が高く一定の速度が出せる車輪と、障害物踏破性能が高いクローラーの2つの走行方式を備え、状況に応じて使い分ける。
地図上の指定位置までの自律走行機能を持ち、より広範囲の情報を得るためにジグザグ走行を行うのが特徴。経路や災害状況を行った後は放水を行う放水砲ロボットの周囲において横から撮影を実施し、目的の場所に放水が到達しているかを監視する。
放水砲ロボット[ウォーター・キャノン]
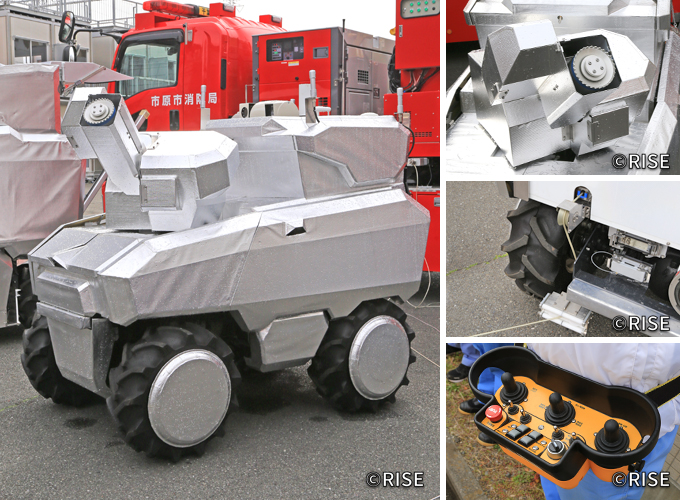
人が近づけない状況での放水活動を担うのが放水砲ロボットで、ホース延長ロボットとともに三菱重工業と深田工業株式会社、東北大学が開発を担当した。
現場の最前線にて活動にあたるため、耐熱性能がカギとなる。そこで、耐熱服などに用いられる銀面生地を外装に用いており、輻射熱をシャットアウトするとともに空気層により熱伝播を最小限にとどめることに成功。あわせて、自衛噴霧機能を組み合わせることで世界最高レベルの耐熱性を実現しており、仕組みは特許出願準備中だという。
放水砲には広角放水、ストレート放水、セミアスピレート泡放射を1つのノズルの切替式で実現した新開発ノズル(特許出願中)を装備。偵察・監視ロボットが偵察した情報を基に自律走行により放水位置まで移動し、風の状況を勘案し、放水到達目標位置への最適なノズルの方向を設定。放水中も偵察・監視ロボットによる放水監視情報を基に風の変化などによる放水の外れを認識し、ノズルの向きを自動で修正する。
ホース延長ロボット[タフ・リーラー]

最大300mの大口径ホースを自動敷設できるホース延長ロボット。現場ではまず放水砲ロボットに自律的に追従し、放水砲ロボットの部署位置まで移動。この際2台はホースでつながった状態であり、後部にホースリールを備えた構造であるため、ホース延長ロボットは「後進」で走行する。放水砲ロボットの部署位置に到達すると、ホース延長ロボットは水利(ポンプ車など)方向へ向かい「前進」で自律走行を開始する。ホース延長に際してホースリールも自律的に制御し、消防隊員が活動可能な安全な領域まで直径150mmの大口径ホース300mを自動繰り出し(世界初:特許出願中)する。
また、ロボット本体だけでなく、高耐熱性を有するホースを新たに開発(特許出願中)。遠距離送水用のホースに銀面の耐熱生地で作られたカバーをセットした構造の高耐熱仕様となっている。
搬送車輌

いすゞのギガをベースにHiab社製のマルチリフトを備えた着脱ボディー型搬送車輌で、帝国繊維が艤装を担当した。
消防ロボットシステムの搬送だけでなく、消防ロボットシステムの中心的な拠点の役割を担う存在であり、シャシー側に備えた大型発動発電機により電力を供給可能。外部給電なしで消防ロボットシステムを連続10時間稼働することができる。
各ロボットの格納スペースであり、充電ステーションや指令システムを備えたコンテナ部はマルチリフトによりシャシーから容易に積み下ろしが可能だ。

指令システム

消防ロボットシステムの自律や協調連携という高度なロボット制御を中心的に行う指令システムは三菱重工と三菱電機特機システムが開発を担当。
メインPC1台とラップトップPC3台などで構成される指令システムは搬送車両のコンテナ内に設置されており、各ロボットから伝送される画像や計測データを解析し、各ロボットの活動を消防隊員に提案。この提案をもとに消防隊員の判断を行い、各ロボットに活動指令を伝送する。また、ロボットの遠隔操縦も可能だ。
実演訓練









| SPEC DATA | |
| 1.飛行型偵察・監視ロボット | |
| 寸 法 | 機体:長さ:1.5m、幅:0.5m、高さ:1.0m プロペラ径:2.5m |
| 質 量 | 69kg |
| 飛行方式 | 同軸二重反転(上下のプロペラが逆向きに回転) バッテリーによるモーター駆動 |
| 最高速度 | 時速約60km(秒速16.0m)(マニュアル操作時) 時速約15km(秒速4.0m)(自律飛行時) |
| 搭載機器 | カメラ、熱画像カメラ、 可燃ガス検知器、放射熱量計 |
| 情報伝送 | 無線 |
| 制御センサ | 高精度GPS、移動速度及び向きを計測するセンサなど |
| 自律機能 | 地図上の指定位置まで飛行 飛行中、2台のカメラを常に目標物を捕捉し撮影 (シンバル機構搭載) |
| 耐輻射熱 | 8.0kW/㎡ |
| 耐風性能 | 12m/s |
| 飛行時間 | 13分(1飛行当たり) |
| 2.走行型偵察・監視ロボット | |
| 寸 法 | 長さ:1.4m、幅:0.9m、高さ:1.8m (アンテナ等を含む) |
| 質 量 | 285kg |
| 走行方式 | 車輪走行:後輪駆動、前輪操舵 クローラー:左右の速度差により方向転換 バッテリーによるモーター駆動 |
| 最高速度 | 時速約5.5km(秒速1.5m) |
| 搭載機器 | ロボットハンド、カメラ、熱画像カメラ、 燃焼ガス検知器、放射熱量計 |
| 情報伝送 | 無線(中継器を搬送設置) |
| 制御センサ | 高精度GPS、回転式レーザー距離計、車輪回転計 移動速度及び向きを計測するセンサなど |
| 自律機能 | 地図上の指定位置まで走行 |
| 耐輻射熱 | 8.0kW/㎡ |
| 段差乗り越え | 40cm |
| その他 | 電子地図生成機能 |
| 3.放水砲ロボット | |
| 寸 法 | 長さ:2.3m、幅:1.4m、高さ:2.1m |
| 質 量 | 1,700kg |
| 走行方式 | 4輪駆動、前輪操舵 バッテリーによるモーター駆動 |
| 最高速度 | 時速7.2km(秒速2.0m) |
| 搭載機器 | カメラ、熱画像カメラ、可燃ガス検知器、 放射熱量計、風向風速計 |
| 情報伝送 | 有線 |
| 制御センサ | 高精度GPS、回転式レーザー距離計、車輪回転計、 移動速度及び向きを計測するセンサなど |
| 自律機能 | 地図上の指定位置まで走行 放水目標位置への最適なノズルの制御(上下左右角度) |
| 耐輻射熱 | 20kW/㎡(自衛噴霧機構付) |
| 放水ノズル | 放水:広角、ストレート 泡放射:セミアスピレート 4,000L/分 1.0MPa(有効射程70m) |
| その他 | 電子地図生成機能 |
| 4.ホース延長ロボット | |
| 寸 法 | 長さ:2.4m、幅:1.7m、高さ:2.1m |
| 質 量 | 2,800kg |
| 走行方式 | 4輪駆動、前輪操舵 バッテリーによるモーター駆動 |
| 最高速度 | 時速7.2km(秒速2.0m) |
| 搭載機器 | カメラ |
| 情報伝送 | 有線 |
| 制御センサ | 高精度GPS、回転式レーザー距離計、車輪回転計、 移動速度及び向きを計測するセンサなど |
| 自律機能 | 地図上の指定位置まで走行、150mmホース延長敷設 先行車追従自律走行 |
| 耐輻射熱 | (放水砲ロボットに準ずる) |
| 搭載ホース | 150mmホース、300m(高耐熱) |
| その他 | 電子地図作成機能 |
| 5.搬送車輌 | |
| シャシー | 10トン車両 |
| 寸法 | 長さ:11.4m、幅:2.5m、高さ:3.8m (コンテナ下降時全長18.8m) |
| 質量 | 25,300kg(各ロボット積載状態時) |
| 変速機 | AT(MTモード有) |
| 発動発電機 | 40KVA、単相100V、200V、三相200V |
| 装備品 | AVM(車両動態管理システム)、 消防無線、全国対応ナビなど |
| コンテナ | 長さ:7.61m、幅:2.44m、高さ:2.58m |
| 指令システム | |
| 構成 | ディスプレイ32インチ、27インチ×2 メインPC +ラップトップPC×3 GISエンジン(SIS社製) ディスプレイの録画機能 UPS3.0KVA(10分間) |
追記情報[2019.5.24]
2019年5月24日に、同システムの配備先である千葉県市原市において「消防ロボットシステムによる特殊装備小隊」の発足式が実施され、同時に、総務省消防庁より正式名称及びシンボルマークが公表された。これに伴い、現在は搬送車輌のマーキングも変更がなされている(本ページで紹介する写真は2019年3月22日に撮影した写真であり、DHCUの名称やエンブレムが入れられている)。
名称
○消防ロボットシステム全体の名称

スクラムフォース
4台のロボットが「力(フォース)」を結集して「スクラム」を組み、過酷な環境下であっても力を合わせて、特殊災害に立ち向かうという意味を込めている。
○消防ロボットシステムを構成する各ロボットの名称
各ロボットの機能、役割を表現。
| 名称 | 愛称 | 意味 |
| 飛行型偵察・監視ロボット | スカイ・アイ | 最初に投入される偵察ドローンは空から。空からの目という意味を直感的に表現。 |
| 走行型偵察・監視ロボット | ランド・アイ | 続いて投入される偵察機は陸(地上)から。陸からの目という意味を直感的に表現。 |
| 放水砲ロボット | ウォーター・キャノン | 砲を意味する「cannon」という言葉を用いて災害に立ち向かう力強い放水を表現。 |
| ホース延長ロボット | タフ・リーラー | 糸巻きを意味する「reel」と頑丈、不屈なという意味の「tough」との組合せ。 |
シンボルマーク
- 災害から住民を守る「盾」を表現
- 4台のロボットの機能を表すアイコン
- スクラムフォースの頭文字「S」と「F」による各アイコン形状の明示的な区分け
- マークを見ただけでも何のマークかわかるように消防ロボットシステム(FIRE FIGHTING ROBOTSYSTEM)の名称を記載
【詳細情報】
消防ロボットシステムの名称及びシンボルマークの公表について(総務省消防庁)
取材協力:総務省消防庁/消防大学校 消防研究センター
写真・文:木下慎次
初出:web限定記事